
Using a PID to control a Motor via PWM using the Ultrasonic sensor HC-SR04 to control a coffee filter distance from the sensor.
Presentation















Zip Code (Arduino Uno PID Motor and HC-SR04 with coffee filter)
Text Arduino Uno Code for PID Motor and HC-SR04 with coffee filter
/*
* Ultrasonic Simple
* Prints the distance read by an ultrasonic sensor in
* centimeters. They are supported to four pins ultrasound
* sensors (like HC-SC04) and three pins (like PING)))
* and Seeed Studio sensors).
*
* The circuit:
* * Module HR-SC04 (four pins) or PING))) (and other with
* three pins), attached to digital pins as follows:
* --------------------- --------------------
* | HC-SC04 | Arduino | | 3 pins | Arduino |
* --------------------- --------------------
* | Vcc | 5V | | Vcc | 5V |
* | Trig | 12 | OR | SIG | 13 |
* | Echo | 13 | | Gnd | GND |
* | Gnd | GND | --------------------
* ---------------------
* Note: You do not obligatorily need to use the pins defined above
*
* By default, the distance returned by the read()
* method is in centimeters. To get the distance in inches,
* pass INC as a parameter.
* Example: ultrasonic.read(INC)
*
* created 3 Apr 2014
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
* modified 23 Jan 2017
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
* modified 03 Mar 2017
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
* modified 11 Jun 2018
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
*
* This example code is released into the MIT License.
*/
//above is from orignal UltrsonicSimple example to give mentioning credit
//this code below is a modification from the example for the coffee filter motor and distance
#include <Ultrasonic.h> //ES's Ultrasonic library ( I used the 4pin version of HC-SR04)
#include <PID_v1.h> //BB's PID
#define MotorPWM 6 // motor control via the TIP120
/*
* Pass as a parameter the trigger and echo pin, respectively,
* or only the signal pin (for sensors 3 pins), like:
* Ultrasonic ultrasonic(13);
*/
Ultrasonic ultrasonic(12, 13);
double distance,distance_avg;
double motor;
double Setpoint=60; // cm
double avg=100;
double avg_meas;
unsigned long Setpoint_change=0;
//Specify the links and initial tuning parameters
double Kp=1, Ki=10, Kd=0.0;
PID myPID(&distance,&motor, &Setpoint, Kp, Ki, Kd,REVERSE); // reverse not direct
void setup() {
Setpoint=42;
Serial.begin(9600);
//turn the PID on
myPID.SetMode(AUTOMATIC);
myPID.SetOutputLimits(0,255);
myPID.SetSampleTime(50);
}
void loop() {
// Pass INC as a parameter to get the distance in inches
for (int i=0;i<avg;i++) {
distance_avg = ultrasonic.read();
avg_meas=avg_meas + distance_avg;
}
avg_meas=avg_meas/avg;
distance=avg_meas;
myPID.Compute();
//motor=map(distance,0,90,0,255);
Serial.print("Setpoint:");
Serial.print(Setpoint);
Serial.print(",");
Serial.print("MotorPWM:");
Serial.print(motor); //motor is getting updated by the myPID.Compute
//motor=255-motor; // if closer to sensor less cm also less motor
Serial.print(",");
analogWrite(MotorPWM, motor);
Serial.print(" Distance_CM:");
Serial.println(distance);
delay(2);
avg_meas=0;
}
Notes
- Presentation: Arduino® Uno with BB’s PID with Motor , Distance Sensor with ES’s Ultrasonic library, and Coffee filter
- Programming Language used: Arduino® IDE
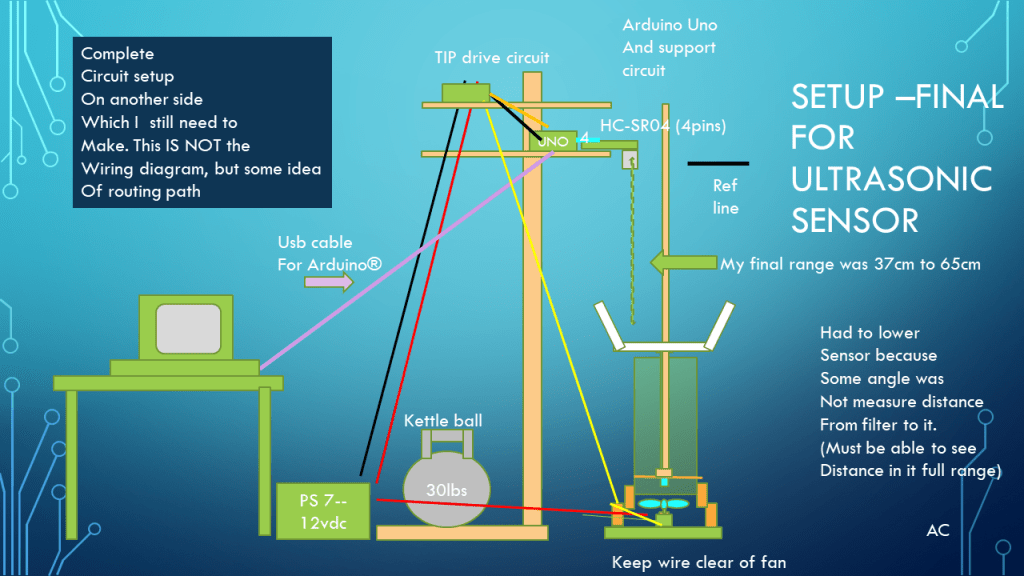
- Hardware Use: Motor, HHC-SR04 distance Sensor, TIP120 transistor ,Arduino® Uno ,Solderless Breadboard. Various jumper type wire.
- Helpful resource: Arduino communities and Arduino’s IDE library manager.
- Arduino® products of respective companies
- Presentation shown to spark ideas of use.
- This presentation is not connected to or endorsed by any company.
- Use at your own risk.
- Tags: PID, Kp, Ki, kd, derivative , integral, Serial plotter
- Title Tag: Arduino® Uno and BB’s PID, Motor, Distance Sensor, HC-SR04, TIP120, PID, coffee filter
- Presentation is part of Blog content: https://testengineerresource.com/
